|
Home->Übersicht
|
Wurftraining im KinderzimmerEin Gemeinschaftsprojekt der Arbeitsgemeinschaft Jugend forscht des Christian-Gymnasiums Hermannsburg |
|
Inhalt: Weitwurf auf 1,5 m2 Vorgehensweise Erfassung des Balls Berechnung der Flugbahn So kommt der Sportplatz ins Kinderzimmer Und eine Lösung für ganz wenig Platz... Experimentiermöglichkeiten Exkurs: Physik der Wurfbewegung |
 Erste Versuche zur Ballerfassung mit WebCams |
Weitwurf auf 1,5 m2 |
||
Auf dem Sportplatz benötigt der Werfer wenig Platz für das Ausholen und viel Platz für den Wurf
Phase 1: Im Augenblick, wo der Ball die Hand des Werfers verlässt, ist die weitere Flugbahn festgelegt
Phase 2: Alles weitere unterliegt relativ einfachen Gesetzen, der Wurf ist nun berechenbar. |
Die meisten Ballsportarten können nur im Freien
ausgeübt werden, da sie viel Platz benötigen. Wer
z.B. für das Handballspielen oder die
Leichtatlethik seine Wurftechnik verbessern will,
muss deshalb in eine große Halle oder auf einen
Sportplatz gehen, um dort trainieren zu können.
Der vollständige Wurf lässt sich in zwei Phasen zerlegen: Phase 1: Phase 2: In dem Moment, in dem der Ball die Hand verlassen hat, ist seine Flugbahn also schon festgelegt: Sie wird durch die Wurfgeschwindigkeit und den Abwurfwinkel eindeutig bestimmt und unterliegt dann relativ einfachen physikalischen Gesetzen. Wenn es gelingt, diese beiden Angaben beim Abwurf zu messen, ist es also gar nicht mehr nötig, ihn wirklich die ganze Strecke fliegen zu lassen um zu erfahren, wann und wo der Ball aufkommen wird. Wenn man Luftreibung und Windverhältnisse nicht
berücksichtigt, ist
seine Flugbahn einfach zu berechnen. Für einen Wurf ohne Anlauf braucht man also nur gerade so viel Platz, dass man die Bewegung des Balles am Anfang seiner Flugbahn erfassen kann, dafür reichen etwa 1,5 m˛. |
|
 |
Vorgehensweise |
||
|
Die Lösung dieser Aufgabenstellung erfolgt in
mehreren Schritten. Dazu ist der Einsatz
verschiedenster Hilfsmittel erforderlich.
Schritt 1: Schritt 2: Schritt 3: Schritt 4: Moderne Computer sind schnell genug, um die Bewegung des Balles in Echtzeit darzustellen. Am aufwändigsten sind dabei die Ballerfassung und die Visualisierung der Flugbahn. |
|
|
|
Datenverarbeitung |
||

|
Erfassung des Balls |
|
| Die Geschwindigkeit und Flugrichtung des Balls nach dem Abwurf soll mithilfe von zwei Webcams erfasst werden. Durch eine senktrechte Anordnung der Kameras zueinander im Raum kann über die zweidimensionalen Bildaufnahmen die Position des Balles bestimmt werden. Ganz ähnlich funktioniert das menschliche Sehen, bei dem das Gehirn die Bilder beider Augen zu einem dreidimensionen Eindruck kombiniert. | |
 Screenshot der Bilderfassungssoftware |
Die von uns programmierte Bildverarbeitungssoftware zeichnet die Bilder beider Kameras mit einer Geschwindigkeit von bis zu 30 Bildern pro Sekunde auf und versucht unabhängig voneinander einen sich bewegenden Ball zu erkennen. Ist kein Ball im Bild, so wird die momentane Aufnahme als Referenzbild gespeichert und alle weiteren Bilder mit diesem verglichen. Lassen sich Abweichungen über einen gewissen Schwellenwert hinaus feststellen, so werden die betroffenen Bilder
einer weiteren Auswertung unterzogen. |
|
Bildverarbeitungsparameter wie die Farbe und Größe des Balls, Bildänderungsschwellen
usw. können über die Benutzerschnittstelle angepasst werden.
Werden in einem kurzen Zeitfenster mehrere Bilder als ballbeinhaltend erkannt, fand ein Wurft statt. |
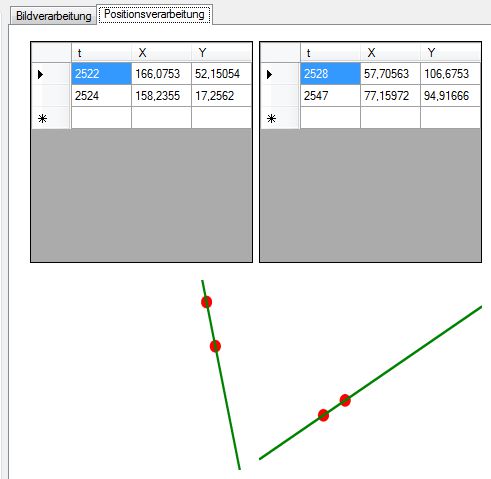 Positionsbestimmung des Balls in den beiden aufgenommenen Bildern |
|
Räumliche-Bildaufnahme |
Entscheidend für eine erfolgreiche Ballerkennung ist neben der Einstellung der Parameter auch eine gute Beleuchtung, wodurch die Webcams eine kürzere Belichtungszeit für ein rauscharmes und farbgesättigtes Bild benötigen. Wird diese zu lang, werden schnelle Bewegungen in einem Bild "verschmiert" aufgenommen. |
|
Berechnung der Flugbahn |
||
|
Iteratives Vorgehen » Gesetzmäßigkeiten festlegen » Zeitintervalle vorgeben » Ersten Schritt aus Startwerte berechnen » Werte für den nächsten Schritt ergeben sich aus dem vorhergehenden |
Für die Berechnung der Wurfbahn nutzen wir die Geschwindigkeiten des Balls in x-, y-, und z- Richtung, die wir durch die Analyse mit den Webcams, zu Beginn des Wurfes, erhalten haben. Anhand dieser Geschwindigkeiten kann man die Koordinaten des Balles (x, y und z) zu beliebigen Zeitpunkten bestimmen. Wir können somit auch den Auftreffpunkt des Balles auf dem Boden und die Wurfweite ermitteln. Vor dem Auftreffen auf dem Boden wissen wir bereits, wie der Wurf verläuft.
Ohne Berücksichtigung der Luftreibung bewegt sich der Ball auf einer Parabelbahn. Dabei führt er in x- und z- Richtung eine gleichförmige Bewegung aus, in y- Richtung eine gleichmäßig beschleunigte, weil dort die Fallbeschleunigung wirkt. Um von den Geschwindigkeitsvektoren zu den Koordinaten zu gelangen, nutzen wir ein iteratives Verfahren. Will man die Luftreibung mit berücksichtigen, sind auch die Kräfte zu berechnen, die den Ball in allen Bewegungsrichtungen abbremsen. |
|
 Gleichförmige Bewegung in x- und z-Richtung, beschleunigte Bewegung in y-Richtung |
Wir berechnen den Verlauf der Flugbahn schrittweise,
das hat den Vorteil, dass man mit einfachen
Gesetzmäßigkeiten auskommt. Zunächst können wir für alle Richtungen (x, y und z) eine Bewegungsgleichung aufstellen. Da mit sehr kleinen Zeitintervallen gearbeitet wird, können wir für unsere Berechnungen in jeder Richtung eine gleichförmige Bewegung annehmen. Die Anfangswerte für den Bewegungsablauf erhalten wir aus der Bilderfassungssoftware, alle weiteren Werte ergeben sich aus dem vorhergehenden Berechnungsschritt. |
|
 Ausschnitt aus einer Excel-Tabelle zum Test einer iterativen Berechnung |
||
|
Um eine hohe Genauigkeit zu erhalten, sind sehr viele Iterationsschritte nötig, die in einer Excel-Tabelle schnell unübersichlich werden können. Mithilfe eines Programmes, wie z.B. in C#, ist das iterative Verfahren sehr schnell anwendbar. Zudem können die Geschwindigkeiten aus dem Programm zur Bilderfassung direkt eingelesen und Koordinaten an bestimmten Stellen auf Abruf ausgegeben werden. |
 Formeln zur iterativen Berechnung (mit Berücksichtigung der Luftreibung), in y-Richtung kommt bei der Beschleunigung noch die Fallbeschleunigung dazu. |
|
|
| So kommt der Sportplatz ins Kinderzimmer | |
 Konstruktionsskizze für den Wurfrahmen, in dem der Abwurf aufgenommen wird. |
Damit der geworfene Ball nach dem Erfassen nicht
weiter durch den Raum fliegt, muss er durch ein
Netz aufgefangen werden. Feste Seitenwände eignen
sich nicht, weil der Ball davon abprallen würde. Der Einwurfbereich muss groß genug sein, damit der Werfer auch mit ausgestrecktem Arm werfen kann, die andere Seite muss sogar noch höher sein, damit auch Würfe schräg nach oben möglich sind. Unser Rahmen ist 0,6 m breit, ca. 2 m lang und zwischen 2,35 m (Einwurf) und 3,5 m hoch. Um es auch freistehend kippsicher zu gestalten, ist die Basis auf 1,6 m verbreitert. Das Fangnetz umgibt den Rahmen - außer an der Einwurföffnung rechts - vollständig. In der Mitte ist eine Platte eingezogen, auf der der geworfene Ball zum Werfer zurückrollen kann. Das hierfür benötigte Rahmengestell lässt sich preisgünstig aus einfachen Hobelleisten und einigen Schrauben fertigen. Außerdem bietet es Befestigungsmöglichkeiten für die beiden Kameras und den Beamer zum Projizieren der berechneten Flugbahn. Es lässt sich trotz seiner Größe leicht zerlegen und transportieren. |
| Verzichtet man auf das Training von Weitwürfen und beschränkt sich stattdessen auf Zielwürfe (z.B. in einen Korb), kann man das Gestell auch kleiner, vor allem niedriger bauen, damit es auch in ein Zimmer mit kleinerer Deckenhöhe passt. | |
|
Damit der Wurf realistisch aussieht und ein "Gefühl" für die Weite gibt, benötigt man einen passenden Hintergrund, auf den die Flugbahn dann realitätsnah eingeblendet werden kann. Mit geeigneten Programmen, von denen es eine Vielzahl als Freeware gibt, kann man einen Sportplatz, eine Sporthalle oder auch ein ganzes Stadion gestalten, in dem man seine Würfe trainiert. Der Fantasie sind da keine Grenzen gesetzt! |
 Das Programm "Blender" erlaubt es, beliebige Sportanlagen zu erstellen und als Hintergrund für die Wurfsimulation zu benutzen. |
|
Material: » 2 WebCams » Holzgestell mit Netz » Computer » Beamer oder großes Display » Software |
In der heutigen
Zeit hat fast jeder einen Computer. Statt eines
Beamers genügt auch ein großes Display oder ein
Fernseher - nur ist dann der Wurf nicht ganz so
realistisch darzustellen. Das Gestell lässt sich
mit ein wenig Übung im Umgang mit Säge und
Bohrer selbst leicht herstellen. Allerdings
benötigt man zwei schnelle, am besten baugleiche
WebCams (die modernen reichen für diesen Zweck).
Der Rest ist Software. Damit halten sich die
Kosten in Grenzen.
Natürlich gibt es auch professionelle Systeme, wie sie z.B. im Tennissport eingesetzt werden. Auch manche Speilkonsolen erlauben etwas Vergleichbares, allerdings ist dort der Wurf etwas unrealistischer, weil kein Ball geworfen, sondern lediglich die Wurfbewegung an sich ausgeführt wird. Unser Ziel war es aber vor allem, den Aufbau mit möglichst einfachen Mitteln zu gestalten und die Bearbeitungsvorgänge in einzelne Schritte zu zerlegen, die auch für Laien verständlich sind. |

 Montage des Wurfrahmens - aus Platzgründen musste der Aufbau im Freien vorhenommen werden. |
|
|
| Und eine Lösung für ganz wenig Platz... | |
| Wer keine Möglichkeit hat, das entsprechende Material zu beschaffen und nur mit dem PC arbeiten will, kann mit der Simulation ebenfalls schon seine Wurftechnik verbessern. Statt der Bildauswertung der Kamera gibt er dann Abwurfwinkel und Startgeschwindigkeit manuell ein und beobachtet, welche Wurfweite er erreicht. Auch Zielwerfen ist damit möglich, wenn man ein Ziel eingibt, das vom Ball getroffen werden soll. | |
|
Wer viel Spaß am Elektronik-Basteln hat, kann sich auch eine Anzeige für die Wurfweite selber bauen, wie sie rechts zu sehen ist. Wie in einem richtigen Stadion zeigen hier Leuchtdioden Ziffern oder einen Text an. Die Ansteuerung erfolgt über einen kleinen Mikrocontroller und eine PC-Software, die den Anzeigetext festlegt. |
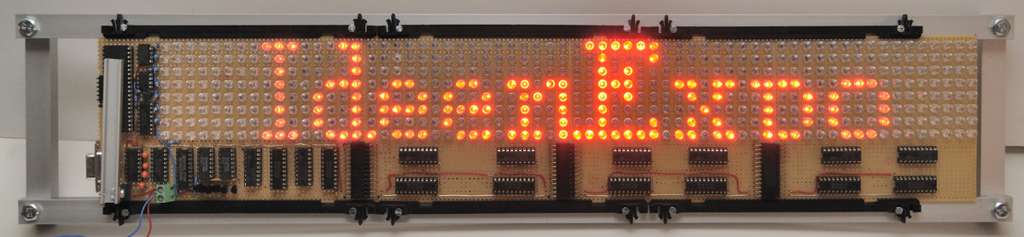 Dieses LED-Display enthält 512 superhelle Leuchtdioden in einem Raster von 8 x 64 und erlaubt die Anzeige von Text und einfacher Grafik. |
|
|
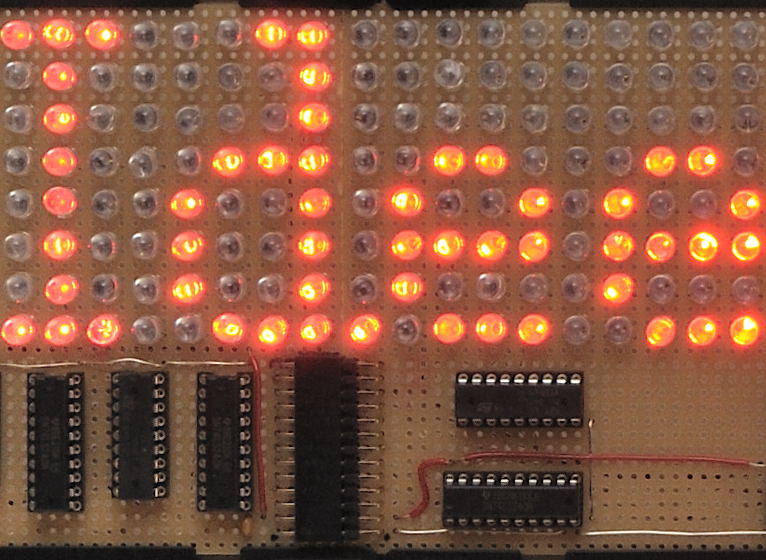
Die Anzeige besteht aus 8 Segmenten. Jedes Segment ist
in 8 Zeilen und 8 Spalten unterteilt. Um die
Ansteuerung so einfach wie möglich zu gestalten, wird
immer nur eine Spalte angezeigt. Der sehr schnelle
Wechsel der einzelnen Spalten erzeugt ein
flimmerfreies Bild. Der Mikrocontroller wählt ein bestimmtes Segment und darin eine einzelne Spalte aus und gibt an, welche LEDs in dieser Spalte leuchten sollen. Danach wählt er die nächste Spalte aus, bis er das Segment vollständig abgearbeitet hat. Danach kommt das nächste Segment auf die gleiche Weise an die Reihe. Hat er so alle Spalten durchlaufen, beginnt er wieder von vorne. Was auf dem Display angezeigt werden soll, wird über ein Programm festgelegt, das über eine serielle Schnittstelle mit dem Display verbunden ist. Sogar Lauftext ist mit diesem Display möglich. |
|
Experimentiermöglichkeiten |
|
|
Der kompakte Aufbau und die begrenzte Bildrate der
WebCams beschränken die maximale
Wurfgeschwindigkeit und die Ballgröße, sodass z.B.
ein hart geworfener Handball damit nicht erfasst
werden kann. Im Freien (z.B. im Garten) dagegen
wäre auch das möglich, wobei man die Kameras in
größerem Abstand aufstellt und den Ball dann mit
einem aufgespannten Netz auffängt. Andererseits ist es mit dem vorgestellten Aufbau möglich, z.B. mit einem Softball zu untersuchen, wie Abwurfwinkel und -geschwindigkeit die Reichweite beeinflussen. Außerdem kann damit Zielwerfen geübt werden. Öffnet man das Netz auf der Rückseite und platziert dort einen Fangkorb, kann sogar die Übereinstimmung von tatsächlicher und berechnter Flugbahn überprüft werden.
|
|
|
Flugweite Je nach dem, in welchem Winkel ein Ball geworfen wird, fliegt er unterschiedlich weit, außerdem erreicht er am Gipfelpunkt seiner Flugbahn unterschiedliche Höhen. Wenn man sich bemüht, immer mit der selben Abwurfgeschwindigkeit zu werfen, kann man die sich dabei ergebenden Flugbahnen vergleichen und den Winkel ermitteln, bei dem die größte Wurfweite erzielt wird.
|
Flugweite je nach Abwurfwinkel |
|
Treffen eines Ziels Da der Ball sich beim Flug absenkt, muss man den Ball in eine Richtung abwerfen, bei der man einen höheren Punkt anvisiert - dazu gehört viel Übung! Außerdem muss man aber in seitlicher Richtung genau in Richtung Ziel werfen (sofern es keinen Seitenwind gibt). Auch das lässt sich mit unserem Gerät trainieren. Ein ähnliches Problem haben zum Beispiel Triathlon-Wettkämpfer. |
Treffen eines Ziels |
|
Einfluss der Luftreibung Verwendet man statt eines Soiftballs z.B. einen Tischtennisball, wird es erheblich schwieriger, eine große Flugweite zu erzielen oder ein Ziel zu treffen. Das liegt daran, dass der Tischtennisball eine viel kleinere Masse hat und dadurch erheblich stärker durch die Luftreibung abgebremst wird. Die Flubahn ist nicht mehr parabelförmig, sondern ballistisch. |
Vergleich von Softball und Tischtennisball |
|
Und das ganze "drumherum"... Das Projekt setzt sich aus einzelnen Modulen zusammen, die auch jedes für sich untersucht werden können. Auf diese Weise können auch Besucherinnen und Besucher, die sich für bestimmte Fragestellungen rund um das Projekt beschäftigen wollen, auf ihre Kosten kommen. Zu diesem Zweck sind die Module so transparent wie möglich gestaltet und erlauben bei Bedarf auch vertiefte Einstiege in die gewählte Problemlösung. |
Projektmodule: |
|